
24 mars 2026
Hitta med SideVision, bekräfta med DownVision och säkra din nästa fångst.
SideVision™ är namnet på Raymarines sidoskannande ekolodsteknologi och är en standardfunktion inbyggd i Axiom- system med RealVision 3D- och RealVision MAX-ekolod. Sidoskannande ekolod ger sportfiskare en tydligare förståelse för undervattensvärlden och avslöjar strukturer, formationer och skuggor som visar var fisken finns. Med Raymarines SideVision™ för bred skanning och DownVision™ för exakt bekräftelse under båten kan du hitta produktiva vatten snabbare och göra varje pass mer meningsfullt. Den här guiden förklarar hur teknologin fungerar och hur du använder den på ett tryggt och säkert sätt.
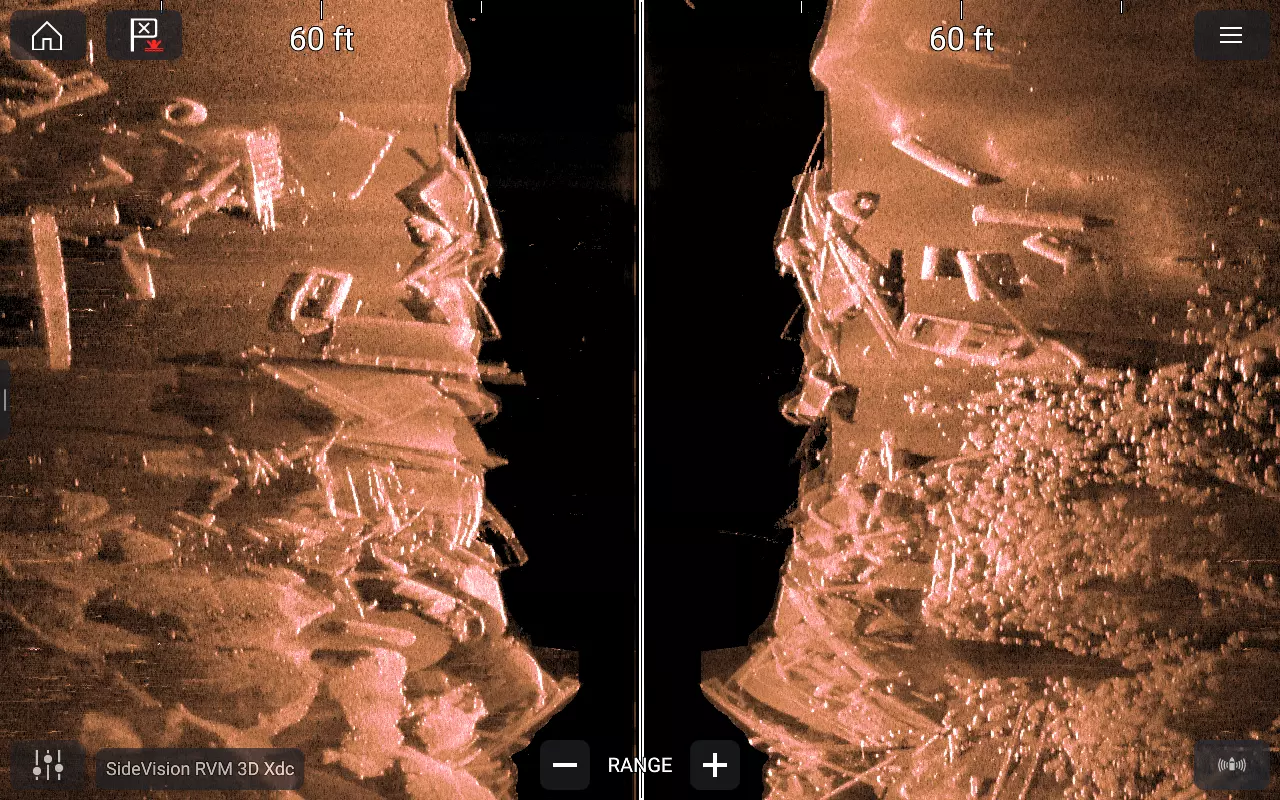
En enda skärmdump av SideVision som postades på våra sociala medier fångade snabbt fiskarnas uppmärksamhet och väckte två stora frågor: Vilken ekolodsteknologi är detta och hur får jag mitt ekolod att se ut så här?
Bilden ovan kommer från vårt CHIRP SideVision ekolod på Axiom 2 Pro RVM– ett ekolod som brett skannar horisontellt utåt och avslöjar undervattensmiljöns struktur, formationer och skuggor. Det fungerar perfekt tillsammans med CHIRP DownVision, som fyller i bilden direkt under båten och bekräftar material, textur och hur ekon staplas vertikalt.
Det enklaste sättet att förstå sidoskannande ekolod är att tänka sig en ficklampa som sveper över ett mörkt rum.
En bred, solfjäderformad ekolodsstråle rör sig ut från båten. När strålen träffar något högt, som bråte, ett skrov eller en påle, skickas en del av energin tillbaka till givaren och resten stoppas upp.
Det "tysta området" bakom föremålet blir en mörk skugga på skärmen.
När du väl har greppat sambandet stråle → objekt → skugga, kan du läsa av skärmen nästan som ett foto – strukturens höjd, material och placering blir tydliga direkt.

Braden Shoemaker, Raymarines globala produktchef för ekolod och fiskesystem, växte upp i Municipio de Florida och har haft ett fiskespö i händerna sedan kort efter att han kunde gå. Han har utan tvekan stor erfarenhet av att använda och tolka ekolodsbilder. När man arbetar i ett område med mycket hård struktur föreslår Braden att man tillämpar en enkel, repeterbar SideVision/DownVision-process:
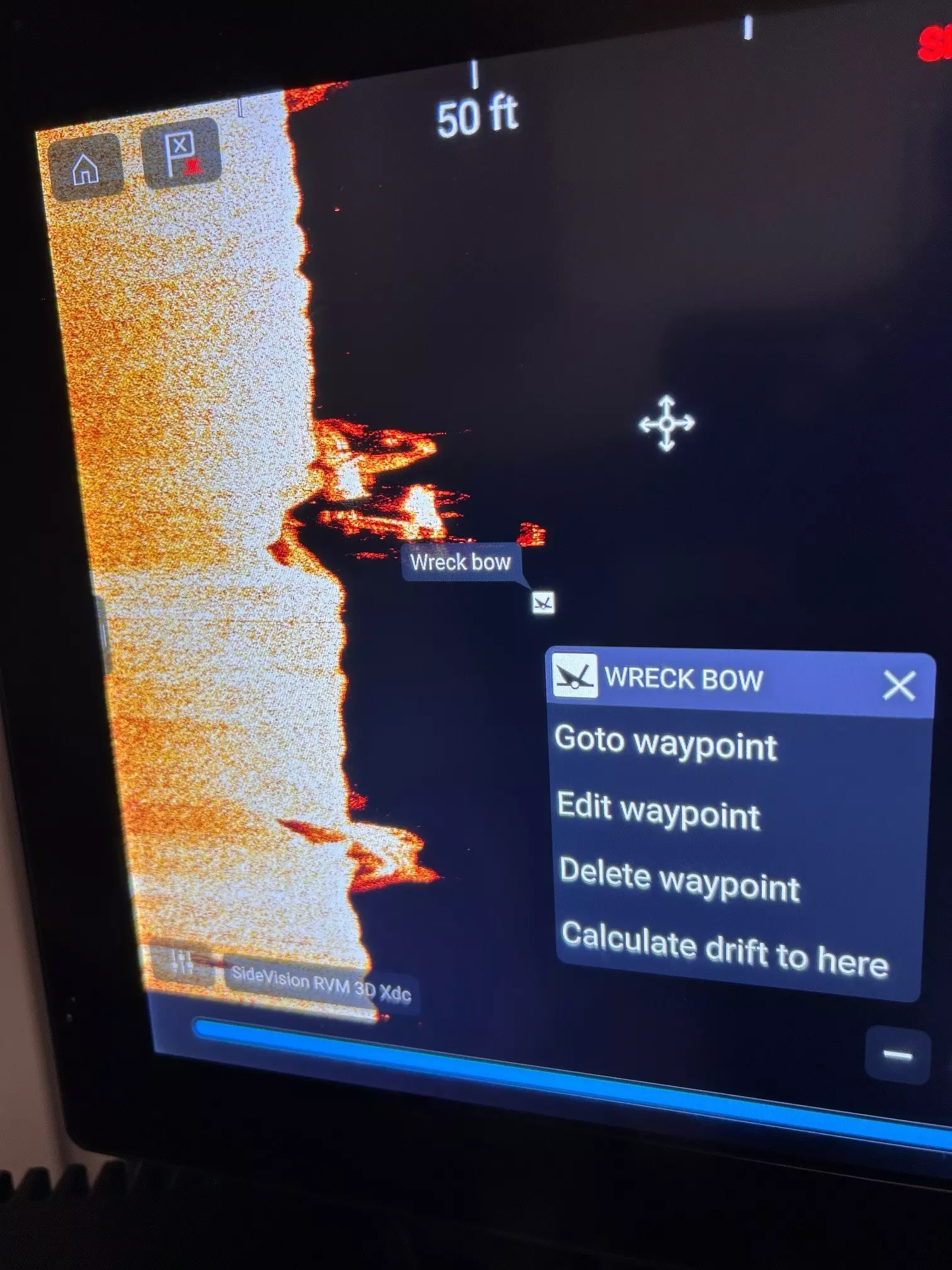
Skärmdump av sökpunktmarkering med SideVision på Raymarine Axiom kartplotter.
Du behöver inte detaljstyra frekvensen med SideVision-ekolod på Axiom eftersom det automatiskt kör ett högdetaljigt CHIRP-band (320–380 kHz). Det viktigaste är att justera de inställningar som påverkar bildens klarhet och skuggkontrast.
Öka tills svaga prickar visas, minska sedan något och sträva efter ljusa, tydliga kanter utan överflödigt brus.
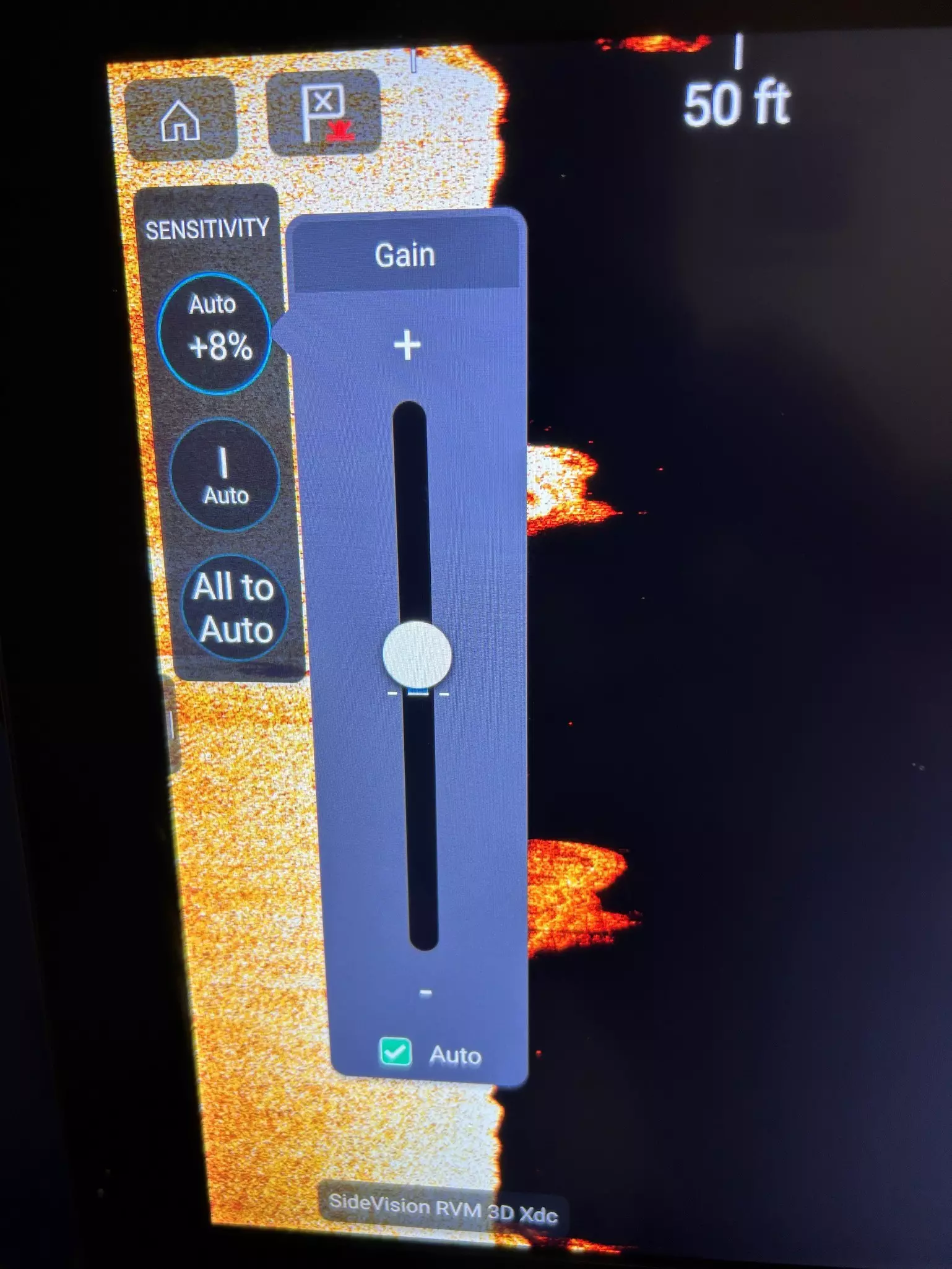
Skärmdump av förstärkningskontroller med SideVision på Raymarine Axiom kartplotter.
Den här inställningen styr hur färgpaletter skalas, särskilt var vit färg appliceras för de hårdaste och starkaste ekona. En liten ökning skärper hårda kanter och håller skuggorna mörka och tydliga, men om du ökar för mycket bleknar bilden och viktiga detaljer försvinner. Målet är att balansera skarpa bottenekon, tydliga sediment och stark skuggkontrast för att få en så användbar vy som möjligt.
Ytfiltret gäller endast DownVision-kanalen och hjälper till att minska brus från kölvattenbubblor, skräp, slam och andra partiklar nära toppen av vattenpelaren. Automatisk filtrering fungerar bra när du snabbt färdas över vattnet, men med manuell kontroll får du jämnare och mer tillförlitliga detaljer i den här typen av kuperad undervattensmiljö.
Hastighets spelar en viktig roll för att hålla SideVision- och DownVision -bilder tydliga, och att upprätthålla stabila 2–4 knutar bevarar rena konturer och konsekvent skugggeometri. Rör du dig för långsamt sträcks och förvrängs objekten, medan för hög fart minskar detaljer och tydlighet. Plötsliga hastighetsförändringar förvränger formen på målen, så att hålla en jämn takt ger de mest exakta och läsbara resultaten.
Om möjligt, korsa varje större objekt du ser från minst två olika riktningar och placera waypoints vid kanter och skuggspetsar. Det här är de mest användbara referenspunkterna när du kommer tillbaka, eftersom rovfisk ofta använder sådana platser som bakhåll när de jagar mindre betesfisk.
Din AxiomsFishfinder blir ännu kraftfullare när du använder den tillsammans med den inbyggda kartplotter. Du kan inte bara se var din båt är i förhållande till den kartlagda botten, utan du kan också lägga till egna waypoints för att markera viktiga intressanta objekt. Waypoints som du fångar på dina ekolodsskärmar syns omedelbart på sjökortet vilket gör att du kan precisera hur de funktioner du såg på ekolodet korrelerar med lödningar och konturlinjer på sjökortet.
Om dina sjökort har stöd för djupskuggning kan du justera funktionen för att markera revets aktiva djupzon, så att rätt vatten tydligt syns på skärmen. Du kan också bygga en enkel rutt som berör varje kluster av märken du identifierat på SideVision och köra den med hastighets normalt 3 till 4 knop. Du kan till och med använda din autopilot eller trollingmotor för att styra rutten åt dig.
Använd din kartplotterspårregistrering för att visa vilka områden du har passerat tidigare, vilket gör det enklare att upprepa produktpassager. Kom också ihåg att namnge och färgkoda dina waypoints, så att mönstren syns tydligt och du snabbt kan fortsätta där du slutade nästa gång.
Oavsett om du fiskar vid konstgjorda rev, grund, pirkanter eller sjögräs, är metoden densamma:
Skanna av brett med SideVision → minska räckvidden → korsa från flera riktningar → bekräfta med DownVision → spara kanter och skuggspetsar som waypoints.
Följ det här arbetssättet så kommer du att läsa av ditt ekolod med större säkerhet, hitta strukturer snabbare och få mer ut av varje pass.

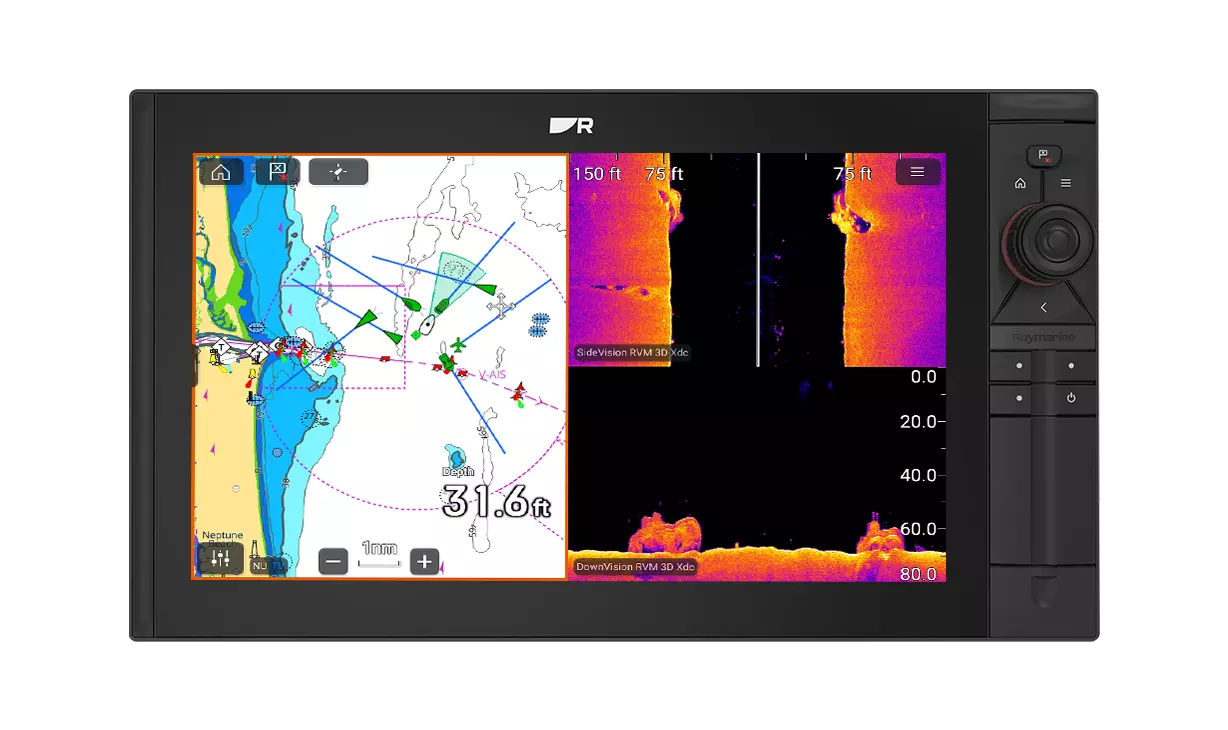
Axiom+ RV-sjökortsplottrar kombinerar säker navigering med inbyggt RealVision™-ekolod för tydlig och tillförlitlig fiskfångst. Finns i storlekarna 7, 9 eller 12 tum med inbyggd GPS.

Axiom 2 RVM kartplottrar är konstruerade för seriösa sportfiskare och havsfiske och kombinerar snabb och responsiv prestanda med RealVision™ MAX-ekolod för exakt fisksökning och säker navigering. Finns med 9, 12 eller 16-tums skärmar som kan läsas i solljus och med inbyggd GPS.

1 kW CHIRP-ekolodsmodul med Realvision 3D, DownVision, Sidevision och High CHIRP-ekolod

1 kW CHIRP-ekolodsmodul med Realvision MAX, DownVision, Sidevision, 3D och och 600W traditionellt CHIRP ekolod












