
24 maart 2026
Vind met SideVision bevestig met DownVision en vergrendel op je volgende vangst.
SideVision™ is de naam voor Raymarine's zijwaarts scannende sonartechnologie en is een standaardfunctie die is ingebouwd in Axiom-systemen met RealVision 3D- en RealVision MAX-sonar. De zijwaarts scannende sonar biedt vissers een duidelijkere manier om de onderwaterwereld te begrijpen, waarbij structuur, reliëf en de schaduwgeometrie worden onthuld die aantonen waar vis zich bevindt. Met Raymarine's SideVision™ voor het scannen van grote oppervlakten en DownVision™ voor nauwkeurige bevestiging onder het schip, kunt u sneller productief water vinden en elke passage zinvoller maken. Deze gids legt uit hoe de technologie werkt en hoe u deze zinvol kunt gebruiken.
Een enkele schermafbeelding van SideVision die op onze sociale media werd geplaatst, trok al snel de aandacht van vissers en zorgde voor twee grote vragen: Wat is deze sonartechnologie en hoe zorg ik ervoor dat mijn sonar er ook zo uitziet?
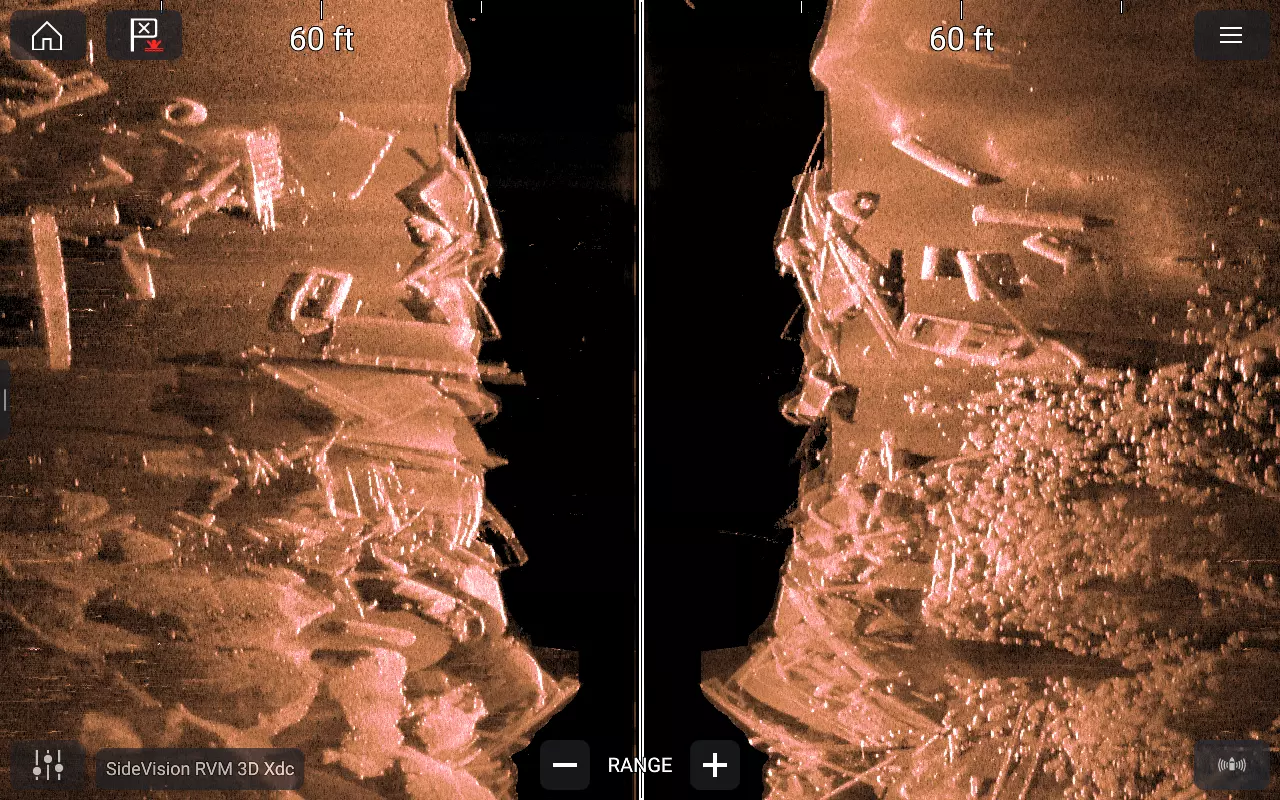
De afbeelding hierboven is afkomstig van onze CHIRP SideVision Sonar op Axiom 2 Pro RVM, een sonar voor het zoeken over grote oppervlakten die horizontaal naar buiten scant om de indeling, het reliëf en de schaduwgeometrie te onthullen. Het werkt perfect samen met CHIRP DownVision, dat het beeld direct onder het schip invult en bevestigt welk materiaal, welke textuur het is en hoe de reflecties verticaal gestapeld zijn.
De eenvoudigste manier om Side Scan Sonar te begrijpen is door u een zaklamp voor te stellen die over een donkere kamer beweegt.
Een brede, waaiervormige sonarstraal beweegt zich vanuit de schip naar buiten. Wanneer die straal iets hoogs raakt, puin, een romp, een paal, keert een deel van de energie terug naar de transducer en de rest wordt geblokkeerd.
De "stille zone" achter het object wordt een donkere schaduw op het display.
Zodra u deze relatie tussen de straal, het object en de schaduw hebt geïnternaliseerd, lijkt het scherm bijna op een foto, waarbij de hoogte van de structuur, het type materiaal en de indeling op hun plaats vallen.

Braden Shoemaker Raymarine's Global Product Manager voor sonar- & Vissystemen, groeide op in Florida en heeft al een vishengel in zijn handen gehad sinds hij kort na zijn eerste stappen kon beginnen. Hij heeft ongetwijfeld enorm veel ervaring met het vastleggen en interpreteren van sonarbeelden op vis. Bij het werken in een gebied met veel harde structuren, stelt Braden voor om een eenvoudig, herhaalbaar SideVision/DownVision-proces toe te passen:
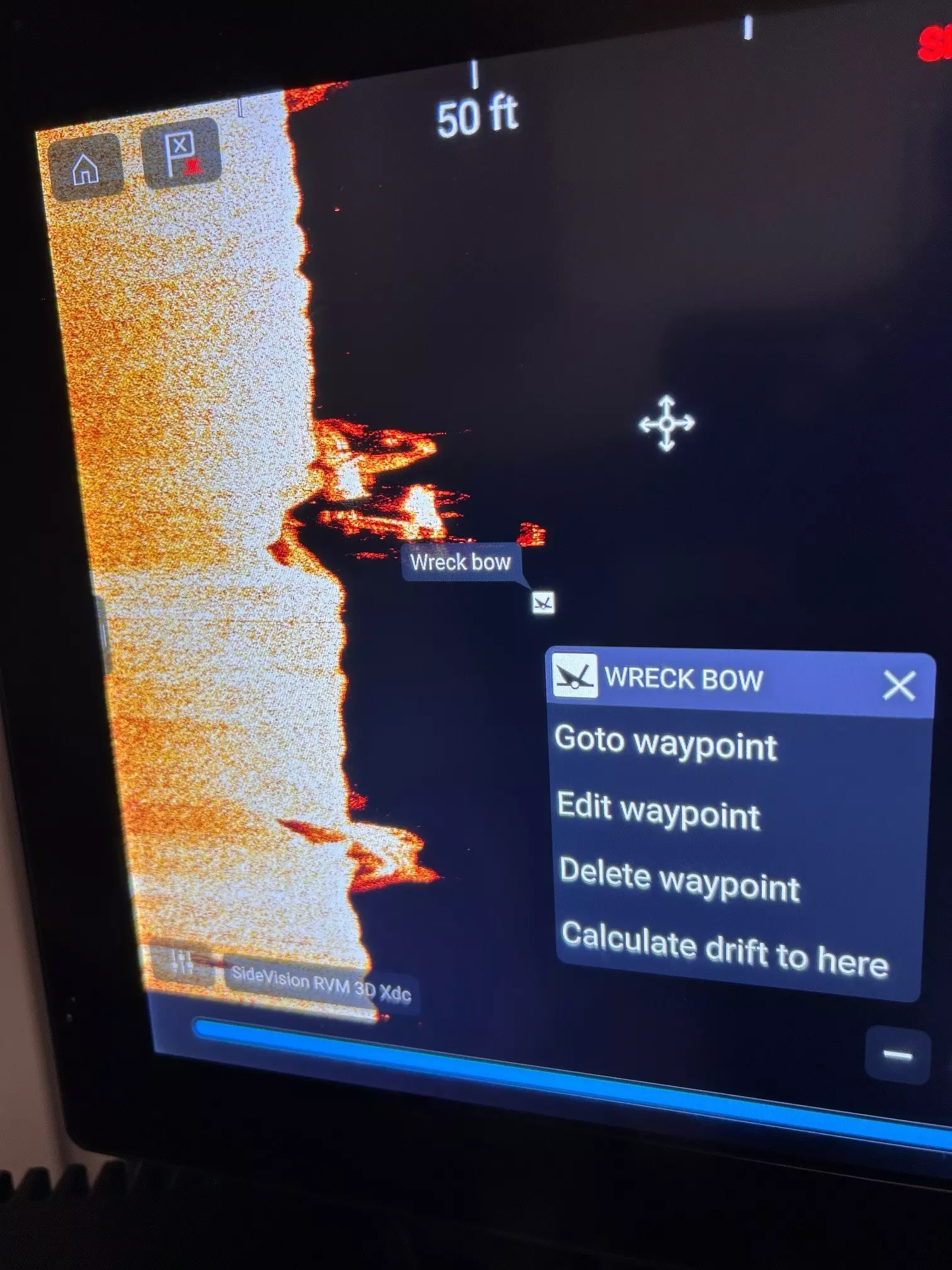
Schermafbeelding van waypointmarkering met SideVision op Raymarine Axiom- kaartplotter.
Met SideVision-sonar op de Axiom hoeft u de frequentie niet nauwkeurig in te stellen, omdat deze automatisch een zeer gedetailleerde CHIRP-band (320-380 kHz) gebruikt. Wel belangrijk is het aanpassen van de helderheid en het schaduwcontrast.
Verhoog de versterking totdat er vage spikkels verschijnen, en verlaag deze dan iets. Streef naar heldere, schone randen zonder overmatige ruis.
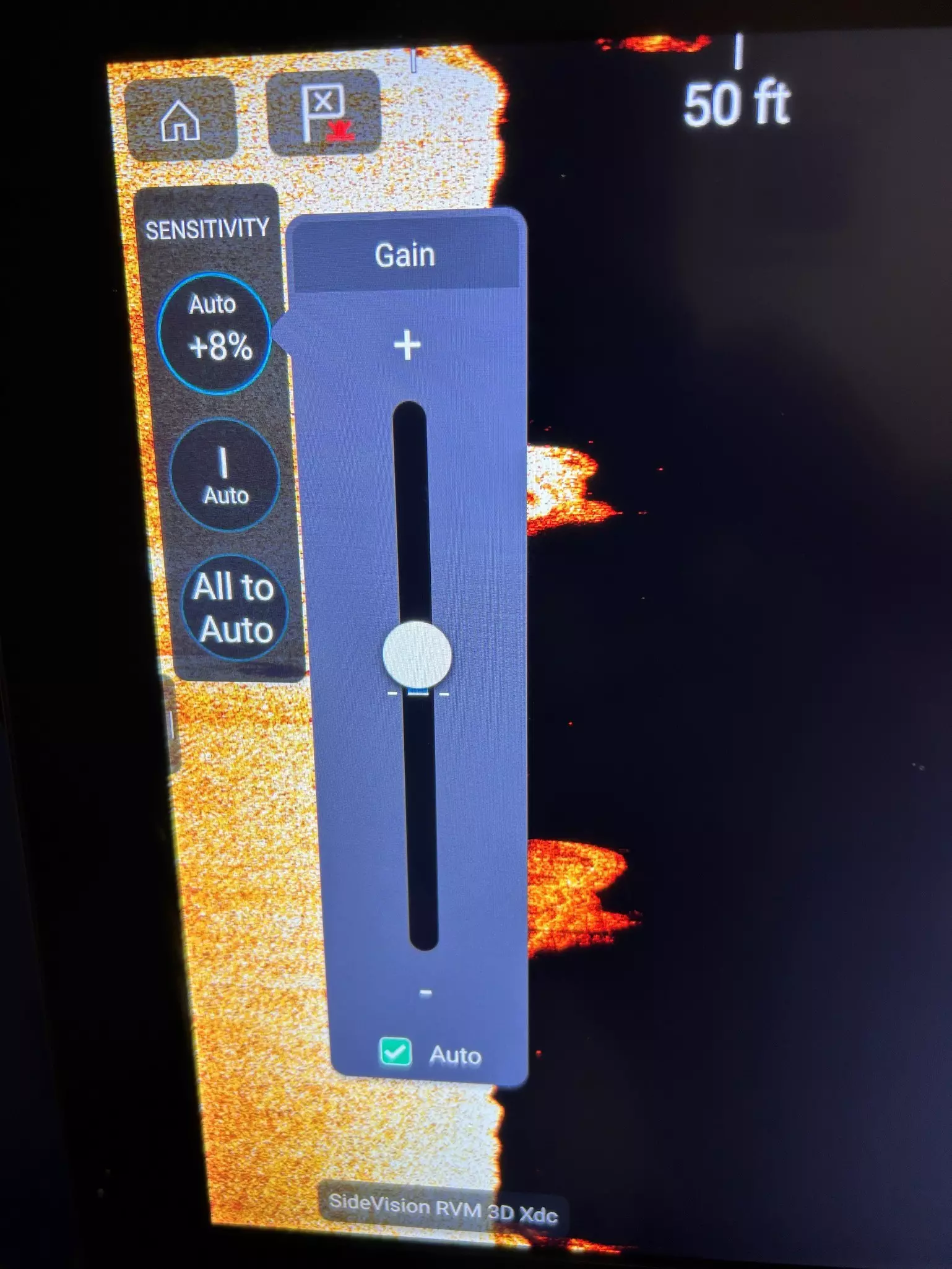
Schermafbeelding van de versterkingsregelaars met SideVision op de kaartplotter van de Raymarine Axiom.
Deze instelling regelt hoe de kleurenpaletten worden geschaald, specifiek waar de witte kleur wordt toegepast voor de hardste en sterkste echo's. Een kleine toename maakt harde randen scherper en houdt schaduwen donker en leesbaar, alleen als u deze te hoog zet, vervaagt het beeld en verdwijnen belangrijke details. Het doel is om een evenwicht te vinden tussen haarscherpe reflecties, helder sediment en een sterk schaduwcontrast voor de meest bruikbare weergave.
Het oppervlaktefilter is alleen van toepassing op het kanaal DownVision en helpt om ruis te verminderen van kielzogbellen, puin, slib en andere deeltjes in de buurt van de bovenkant van de waterkolom. Automatische filtering is actief wanneer u snel over het water beweegt, maar handmatige bediening biedt de meest consistente details in dit soort omgevingen met veel reliëf.
De snelheid speelt een belangrijke rol bij het scherp houden van de beelden van SideVision en DownVision. Een constante snelheid van 2-4 knopen zorgt voor duidelijke contouren en consistente schaduwgeometrie. Als u te langzaam vaart, worden objecten uitgerekt en vervormd, terwijl te snel varen het detail en de helderheid vermindert. Plotselinge veranderingen in snelheid vervormen de vorm van de doelwitten, dus een constante snelheid aanhouden geeft de meest nauwkeurige en leesbare resultaten.
Vaar liefst kruiselings over elk belangrijk punt dat u ziet vanuit ten minste twee richtingen en plaats waypoints langs de randen en op de toppen van schaduwen. Dit zijn de meest informatieve referentiepunten voor wanneer u terugkeert, aangezien roofvissen deze gebieden vaak gebruiken als hinderlagen om op kleinere aasvissen te jagen.
De visvinder van uw Axiom wordt nog krachtiger wanneer u deze gebruikt in combinatie met de ingebouwde kaartplotter. U kunt niet alleen zien waar uw schip zich bevindt ten opzichte van de gekarteerde bodem, u kunt ook uw eigen waypoints toevoegen om belangrijke objecten te markeren. De waypoints die u op uw sonarschermen vastlegt, zijn direct zichtbaar op de kaart waardoor u precies kunt zien hoe de eigenschappen die u op de sonar zag, overeenkomen met puntmetingen en contourlijnen op de kaart.
Als uw kaarten dieptekleuring ondersteunen, schakel deze functie dan in om de actieve dieptezone van het rif te markeren, zodat het "juiste water" duidelijk op uw scherm opvalt. U kunt ook een eenvoudige route maken die elk cluster van markeringen aanraakt dat u op SideVision hebt geïdentificeerd en deze afleggen met een snelheid van 3 tot 4 knopen. U kunt zelfs uw stuurautomaat of trekoperatie gebruiken om de route voor u te sturen.
Gebruik de trackrecorder van uw kaartplotterom te zien welke gebieden u eerder bent gepasseerd. Zo kunt u productpassages gemakkelijker herhalen. Vergeet ook niet om de waypoints te benoemen en van een kleur te voorzien, zodat patronen opvallen, waardoor u snel kunt zien waar u was gebleven bij uw vorige bezoek.
Of je nu vist bij kunstmatige riffen, aanleglijnen, steigerranden of brugpuin, de methode blijft hetzelfde:
Scan breed met SideVision → versmal het bereik → kruis vanuit meerdere richtingen → verifieer met DownVision → sla randen en de toppen van schaduwen op als waypoints.
Vertrouw op dit ritme en je zult je vis met meer vertrouwen aflezen, structuren sneller herkennen en meer profijt halen uit elke worp.

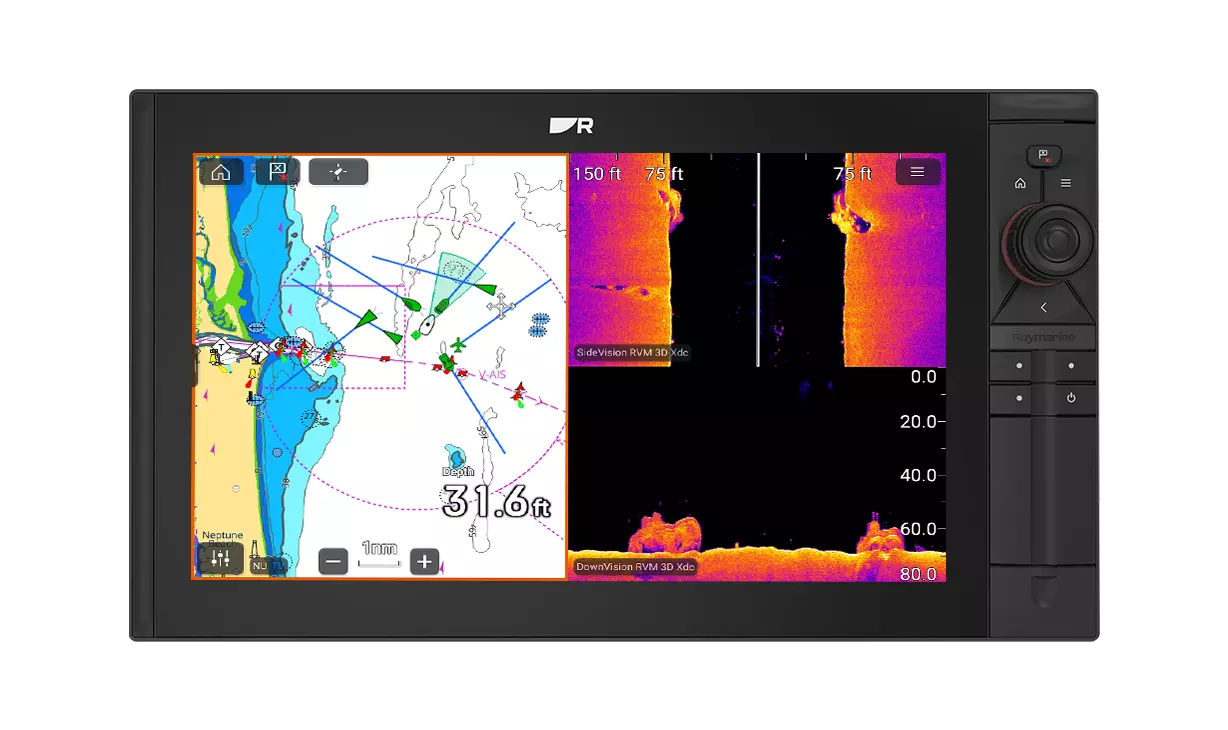
Axiom+ RV kaartplotters combineren betrouwbare navigatie met ingebouwde RealVision™ sonar voor duidelijke, betrouwbare visopsporing. Verkrijgbaar in 7, 9 of 12 inch met ingebouwde GPS.

Ontworpen voor serieuze zeevisserij combineren Axiom RVM 2 kaartplotters snelle, responsieve prestaties ™ RealVisionvoor nauwkeurige visen navigatie sonar Beschikbaar in 9, 12 of 16 inch displays die in zonlicht leesbaar zijn en ingebouwde GPS hebben.

1kW CHIRP-sonarmodule met RealVision 3D, DownVision, SideVision en hoge CHIRP-sonar

1kW CHIRP-sonarmodule met RealVision MAX, DownVision, SideVision, 3D en 600W traditionele CHIRP-sonar












