
24 maaliskuuta 2026
Etsi SideVisionilla vahvista DownVisionilla ja lukitse seuraava saaliisi.
SideVision™ on Raymarinen sivuskannaavan kaikuluotainteknologian nimi, ja se on vakio-ominaisuus Axiom-järjestelmissä, joissa on RealVision 3D- ja RealVision MAX -luotain. Viistokaikuluotain antaa kalastajille selkeämmän näkemyksen vedenalaisesta maailmasta. Se paljastaa rakenteet, korkeuserot ja varjot, jotka kertovat, missä kalat oleskelevat. Raymarinen SideVision™-tekniikka mahdollistaa laajan alueen skannauksen ja DownVision™-tekniikka tarkat vahvistukset veneen alla. Näiden avulla löydät tuottavat vedet nopeammin ja jokainen läpikulku on merkityksellisempi. Tässä oppaassa kerrotaan, miten tekniikka toimii ja miten sitä voi käyttää luottavaisin mielin.
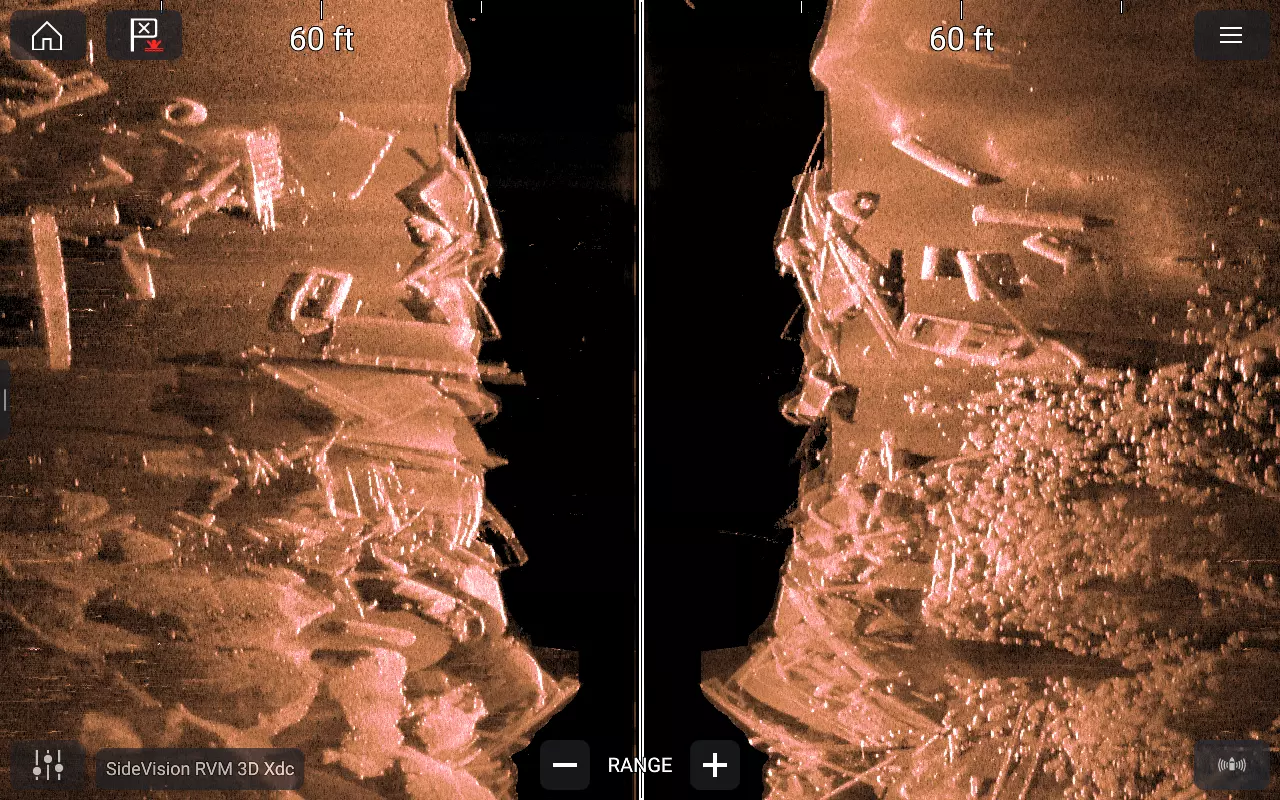
Yksi SideVision-kuvakaappaus, joka julkaistiin sosiaalisessa mediassa, herätti nopeasti kalastajien huomion ja kaksi isoa kysymystä: Mitä kaikuluotainteknologiaa tämä on ja miten saan kaikuluotaimeni näyttämään samalta?
Yllä oleva kuva on otettu Axiom 2 Pro RVM -monitoiminäytöllä varustettuna CHIRP SideVision -kaikuluotaimella. Se on laajan alueen etsintäkaikuluotain, joka luotaa vaakasuunnassa ulospäin paljastaen pohjan muodot, korkeuserot ja varjot. Se yhdistyy luonnollisesti CHIRP DownVision -toimintoon, joka täydentää kuvan suoraan veneen alta vahvistaen materiaalin, tekstuurin ja miten kaikupalautteet asettuvat pystysuunnassa päällekkäin.
Helpoin tapa ymmärtää viistokaikuluotainta on kuvitella taskulamppu, joka pyyhkäisee pimeässä huoneessa.
Laaja suppilomainen kaikuluotainsäde liikkuu veneestä ulospäin. Kun säde osuu johonkin korkeaan, esimerkiksi kivikasaan, veneen runkoon tai paaluun, osa energiasta palaa takaisin anturiin, ja loppujen kulku estyy.
Kohteen takana olevasta "hiljaisesta vyöhykkeestä" tulee näytöllä tumma varjo.
Kun ymmärrät keila → kohde → varjo -suhteen, näyttö näyttää melkein valokuvalta, jossa rakenteen korkeus, materiaalityyppi ja asetelma loksahtavat kohdalleen.

Braden Shoemaker, Raymarinen kaikuluotainten ja kalastusjärjestelmien globaali tuotepäällikkö, varttui Floridassa ja on pitänyt kalastusvavan käsissään pian oppiessaan kävelemään. Hänellä on epäilemättä valtava määrä kokemusta kaikuluotainkuvien tallentamisesta ja tulkitsemisesta. Kun työskennellään alueella, jossa on paljon kovaa rakennetta, Braden ehdottaa yksinkertaisen, toistettavan SideVision/DownVision-prosessin soveltamista:
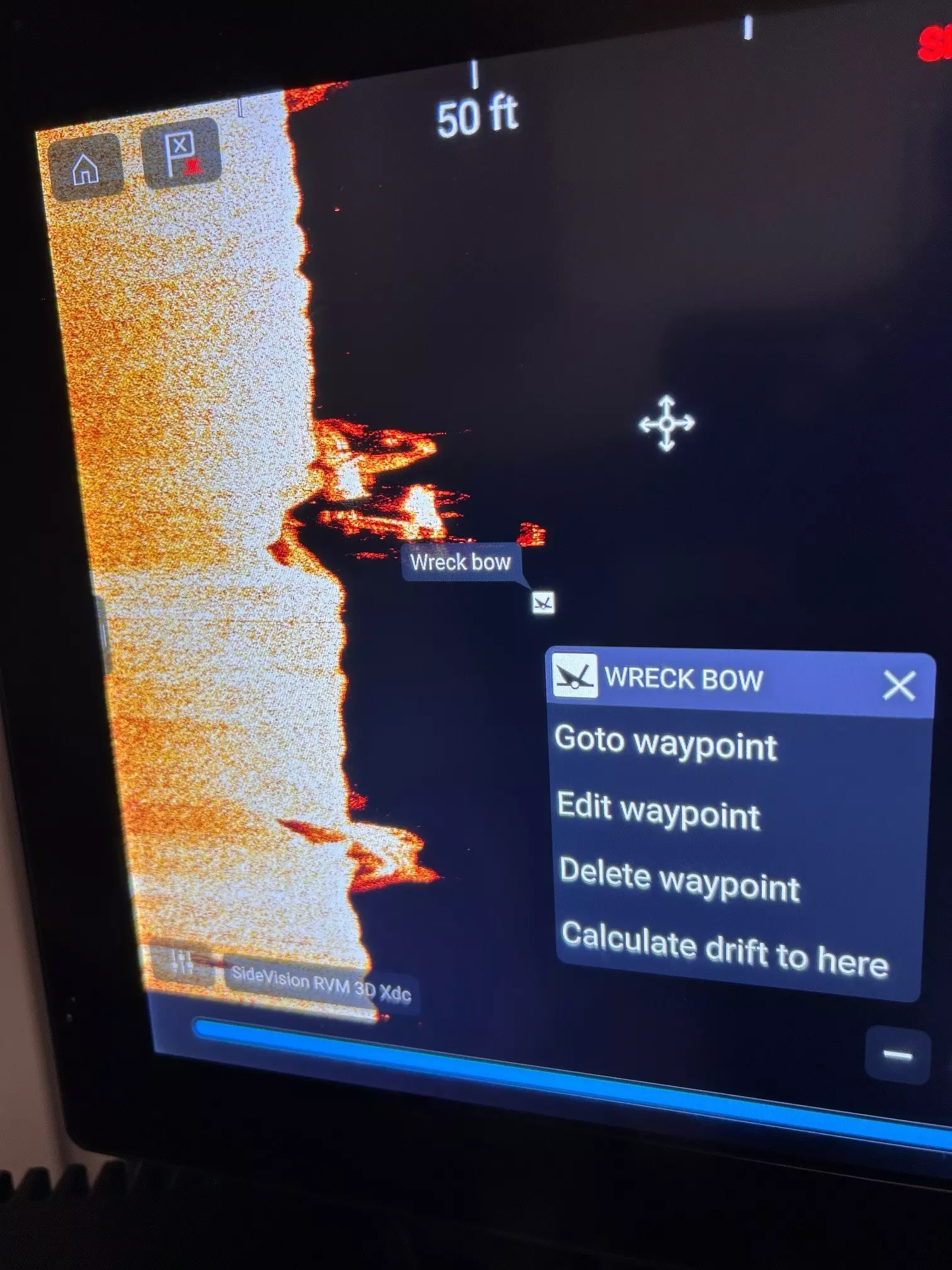
Näyttökuva reittipisteen merkistä SideVisionilla Raymarine Axiom Chartplotterissa.
Sinun ei tarvitse mikrohallita taajuutta SideVision -kaikuluotaimella Axiomissa koska se käyttää automaattisesti tarkkaa CHIRP- kaistaa (320–380 kHz). Tärkeintä on säätää ne asetukset, jotka vaikuttavat kuvan selkeyteen ja varjojen kontrastiin.
Säädä tasoa ylöspäin, kunnes aivan kevyttä kohinaa näkyy, ja palaa hieman takaisin saadaksesi terävät, puhtaat reunat ilman häiriöitä.
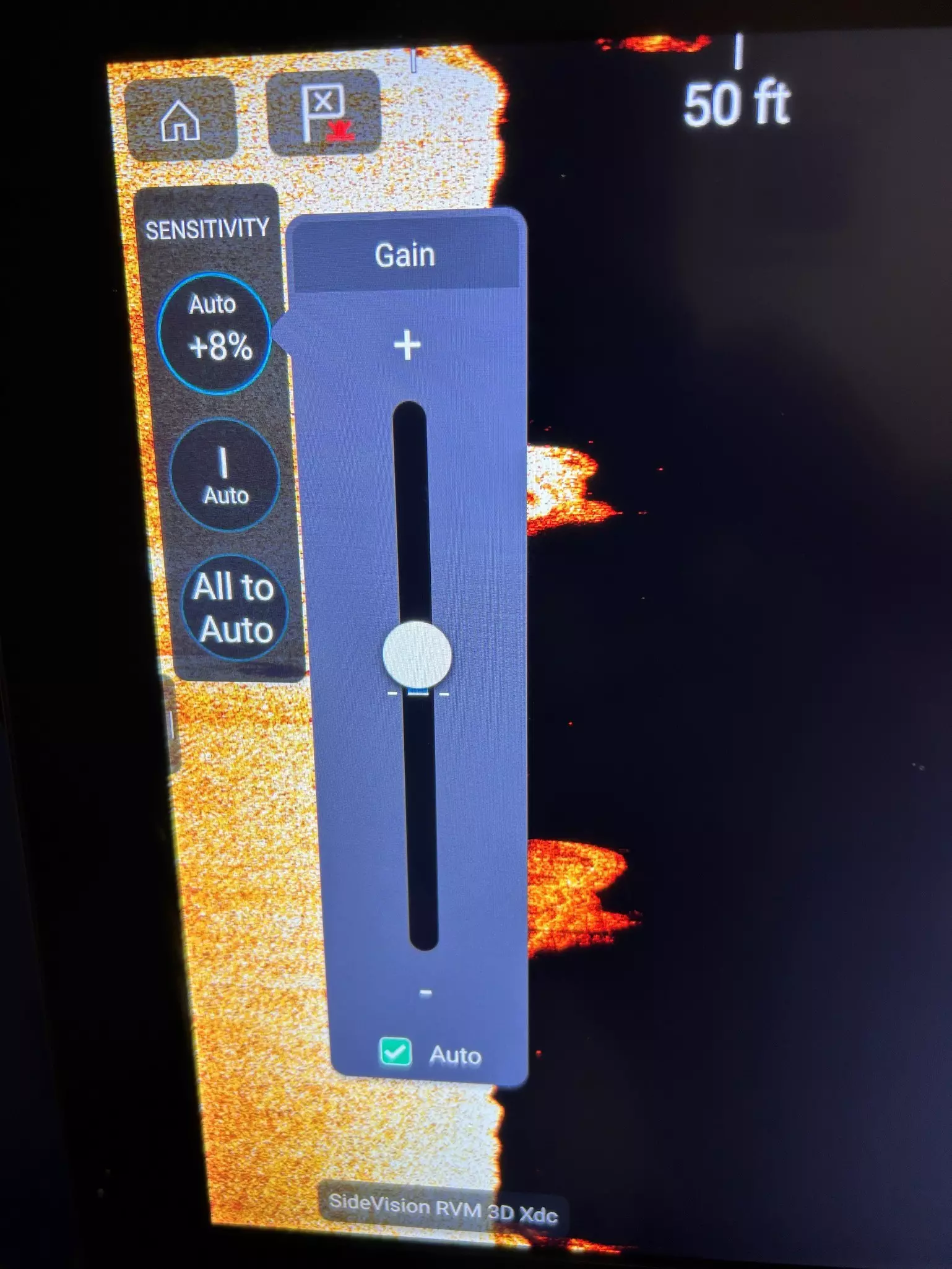
Kuvakaappaus vahvistuksen säätimistä SideVisionin avulla Raymarine Axiom -karttaplotterissa.
Tämä asetus määrittää väripaletin skaalausta ja sitä, missä kohtaa valkoinen korostus näkyy kaikkein kovimmissa ja vahvimmissa kaiuissa. Pieni lisäys terävöittää kovia reunoja ja pitää varjot tummina ja luettavina, mutta liian suuri lisäys ylivalottaa kuvan ja poistaa tärkeitä yksityiskohtia. Tavoitteena on tasapainottaa terävät kovat heijastukset, selkeä sedimentti ja voimakas varjokontrasti, jotta kuva olisi mahdollisimman hyödyllinen.
Pintasuodatin koskee vain DownVision-kanavaa ja auttaa vähentämään vanaveden kuplien, roskien, lietteen ja muiden vesipatsaan yläosassa olevien hiukkasten aiheuttamaa kohinaa. Automaattinen suodatus on toimiva ratkaisu nopeassa ajossa, mutta manuaalinen säätö tuottaa tasaisimmat ja luotettavimmat yksityiskohdat tällaisessa voimakkaasti vaihtelevassa pohjarakenteessa.
Nopeus on tärkeässä roolissa SideVision ja DownVision -kuvien selkeyden säilyttämisessä, ja tasaisen 2–4 solmun ylläpitäminen säilyttää puhtaat ääriviivat ja yhtenäisen varjogeometrian. Liian hidas eteneminen venyttää ja vääristää kohteita, kun taas liian nopea eteneminen vähentää yksityiskohtia ja selkeyttä. Äkilliset nopeuden muutokset vääristävät kohteiden muotoa, joten tasaisen vauhdin pitäminen antaa tarkimmat ja luettavimmat tulokset.
Mikäli mahdollista, aja jokainen merkittävä kohde ristiin vähintään kahdesta suunnasta ja aseta reittipisteet reuna‑alueille ja varjojen kärkiin. Nämä pisteet ovat arvokkaimpia, kun palaat takaisin, koska petokalat käyttävät näitä alueita usein väijytyspaikkoina syödessään pienempiä syöttikaloja.
Axiom-kalastuskaikuluotaimesta tulee entistä tehokkaampi, kun käytät sitä yhdessä sen sisäänrakennetun karttaplotterin kanssa. Et ainoastaan näe, missä veneesi sijaitsee suhteessa kartoitettuun pohjaan, vaan voit myös lisätä omia reittipisteitäsi merkitäksesi tärkeät kohteet. Kaikuluotainnäytöllä tallettamasi reittipisteet näkyvät heti kartalla, jolloin voit tarkasti nähdä, miten luotaimella havaitut rakenteet vastaavat kartan syvyyslukemia ja korkeuskäyriä.
Jos karttasi tukevat syvyysvarjostusta, ota se käyttöön ja korosta riutan aktiivinen syvyysalue, jolloin "oikea vesi" erottuu selvästi näytöllä. Voit myös rakentaa yksinkertaisen reitin, joka koskettaa jokaista SideVisionissa tunnistamaasi merkkiryppää, ja ajaa sen kuvantamisnopeudella, normaalisti 3 - 4 solmua. Voit jopa käyttää autopilottia tai keulamoottoria reitin ajamiseen.
Käytä karttaplotterin reitin tallennustoimintoa ja katso, mitä alueita olet jo kiertänyt, jolloin luotausten toistaminen on helpompaa. Muista myös nimetä ja värikoodata reittipisteet, jotta kuviot erottuvat ja voit nopeasti jatkaa siitä, mihin jäit viime kerralla.
Kalastatpa sitten keinotekoisilla riutoilla, laiturilinjoilla, laiturin reunoilta tai silta-alueilta, menetelmä pysyy samana:
Skannaa laajalle SideVisionilla → kiristä aluetta → ylitä useista otsikoista → tarkista DownVisionilla → tallenna reunat ja varjojen kärjet reittipisteiksi.
Luota tähän rytmiin, niin luet kaikuluotainta varmemmin, tunnistat rakenteet nopeammin ja saat enemmän irti joka luotauksesta.

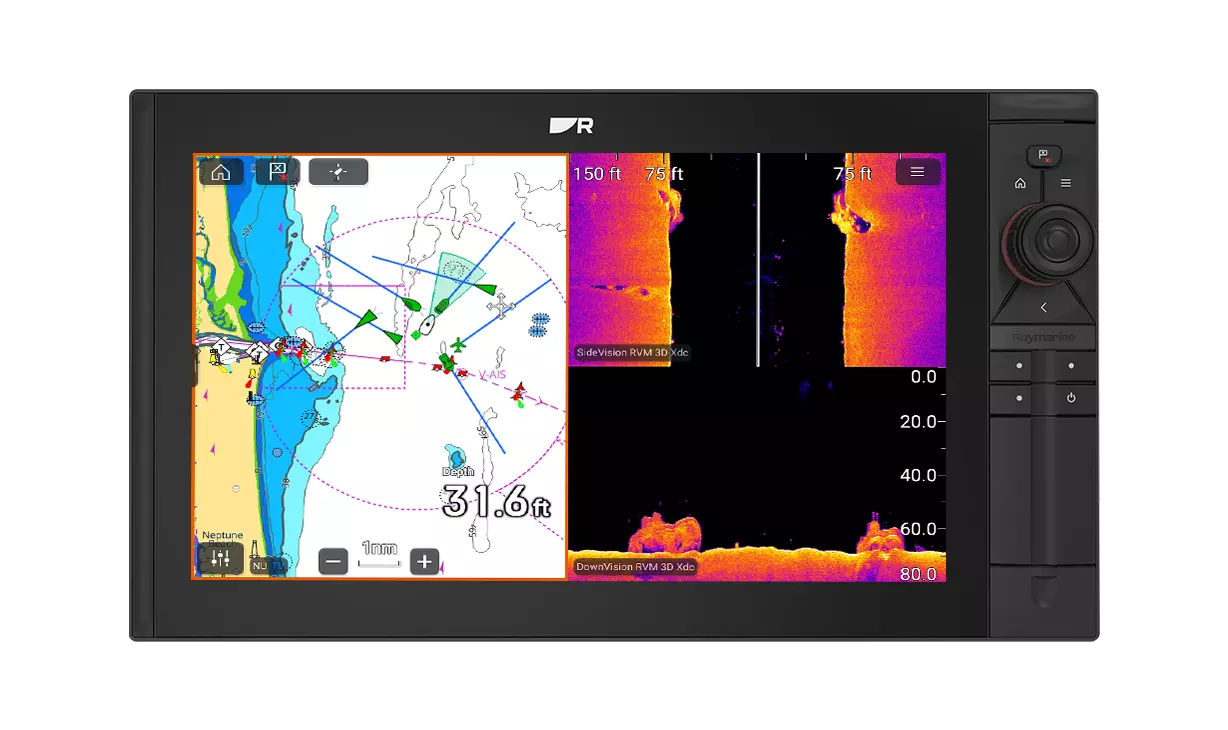
Axiom+ RV-karttaplottereissa yhdistyvät varma navigointi ja sisäänrakennettu RealVision™-kaikuluotain, joka mahdollistaa selkeän ja luotettavan kalanetsinnän. Saatavana 7-, 9- tai 12-tuumainen malli, jossa on sisäänrakennettu GPS.

Axiom 2 RVM -karttaplotterit on suunniteltu vakavaraisille kalastajille ja avomerikalastukseen. Ne yhdistävät nopean ja reagoivan suorituskyvyn RealVision™ MAX -luotaimeen, joka mahdollistaa tarkan kalanpaikannuksen ja luotettavan navigoinnin. Saatavana 9, 12 tai 16 tuuman näytöillä, jotka ovat luettavissa auringonvalossa ja joissa on sisäänrakennettu GPS.

1 kW:n CHIRP-kaikuluotainmoduuli, jossa on RealVision 3D, DownVision, SideVision ja High CHIRP -kaikuluotain

1 kW:n CHIRP-kaikuluotainmoduuli, jossa on RealVision MAX, DownVision, SideVision, 3D ja 600 W:n perinteinen CHIRP-kaikuluotain












