
24 mars 2026
Repérez avec SideVision confirmez avec DownVision et verrouillage -vous sur votre prochaine prise.
SideVision™ est le nom de la technologie de sonar de balayage latéral de Raymarine, et constitue une fonctionnalité standard intégrée aux systèmes Axiom avec sondeur RealVision 3D et RealVision MAX. Le balayage latéral sondeur offre aux pêcheurs une manière plus claire de comprendre le monde sous-marin, révélant la structure, le relief et la géométrie des ombres qui indiquent où poisson se trouve. Grâce à SideVision™ de Raymarine pour un balayage de grande surface et DownVision™ pour une confirmation précise sous le bateau, vous pouvez trouver plus rapidement les zones productives et rendre chaque passage plus significatif. Ce guide explique comment fonctionne la technologie et comment l’utiliser avec confiance.
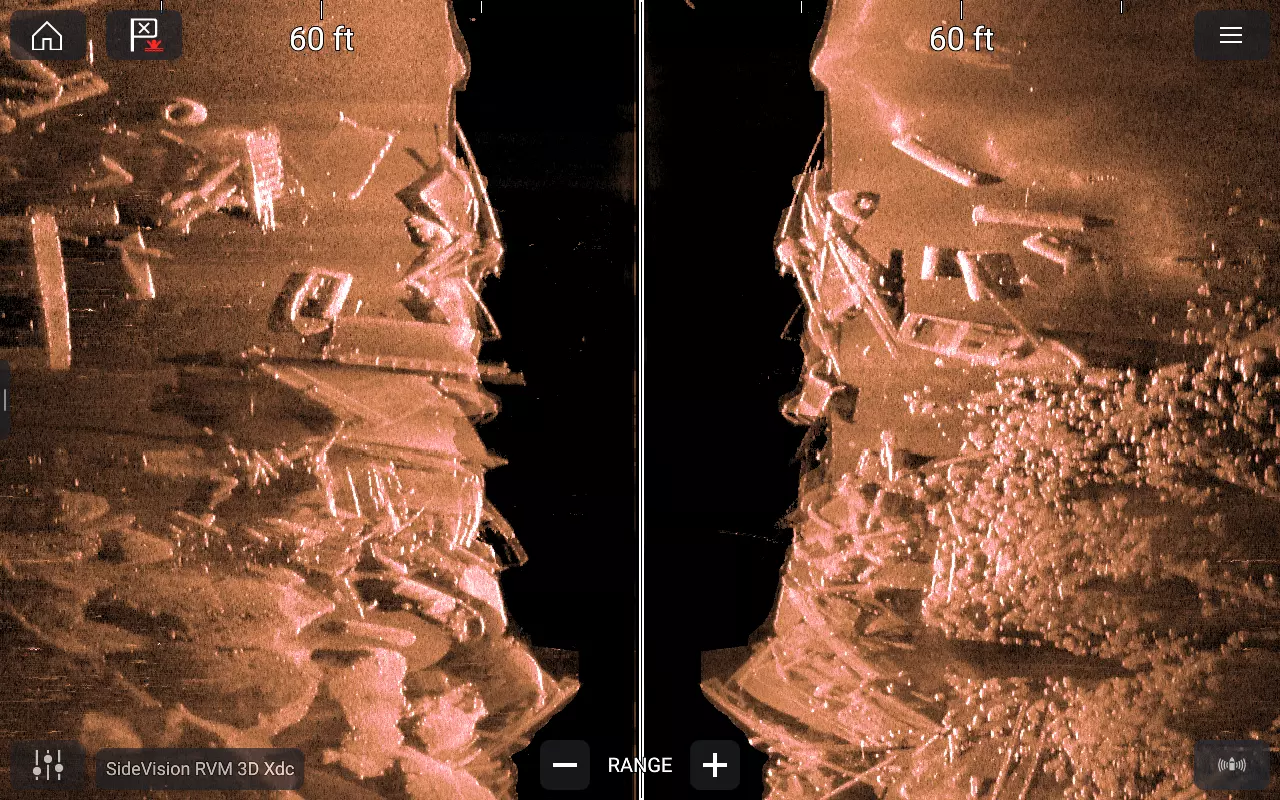
Une simple capture d'écran SideVision publiée sur nos réseaux sociaux a rapidement attiré l'attention des pêcheurs et soulevé deux grandes questions : De quelle technologie de sonar s'agit-il et comment puis-je obtenir un sondeur qui ressemble à celui-ci ?
L’image ci-dessus provient de notre sondeur CHIRP SideVision sur Axiom 2 Pro RVM, un sondeur de recherche à grande surface qui balaye horizontalement vers l’extérieur pour révéler la disposition, le relief et la géométrie des ombres. Il s’associe naturellement avec le CHIRP DownVision, qui complète l’image directement sous le bateau, confirmant le matériau, la texture et la manière dont les retours s’empilent verticalement.
Le moyen le plus simple de comprendre le sondeur à balayage latéral est d’imaginer une lampe de poche balayant une pièce sombre.
Un large faisceau de sondeur en forme de ventilateur se déplace vers l’extérieur depuis le bateau. Lorsque ce faisceau touche quelque chose de haut, des débris, une coque, un empilement, une partie de l’énergie retourne à la sonde, et le reste est bloqué.
La « zone silencieuse » derrière l’objet devient une ombre sombre sur l’écran.
Une fois que vous avez intégré cette relation faisceau → objet → ombre, l’écran se lit presque comme une photographie, avec la hauteur de la structure, le type de matériau et la disposition qui s’affichent.

Braden Shoemaker responsable mondial des produits Raymarine pour sondeur & les systèmes de pêche, a grandi à Florida et a une canne à pêche entre les mains depuis qu'il sait marcher. Il possède sans aucun doute une grande expérience en matière de capture et d'interprétation sondeur sur les détecteurs poisson. Lorsqu’il travaille dans une zone avec beaucoup de structures dures, Braden suggère d’appliquer un processus simple et répétable SideVision/DownVision :
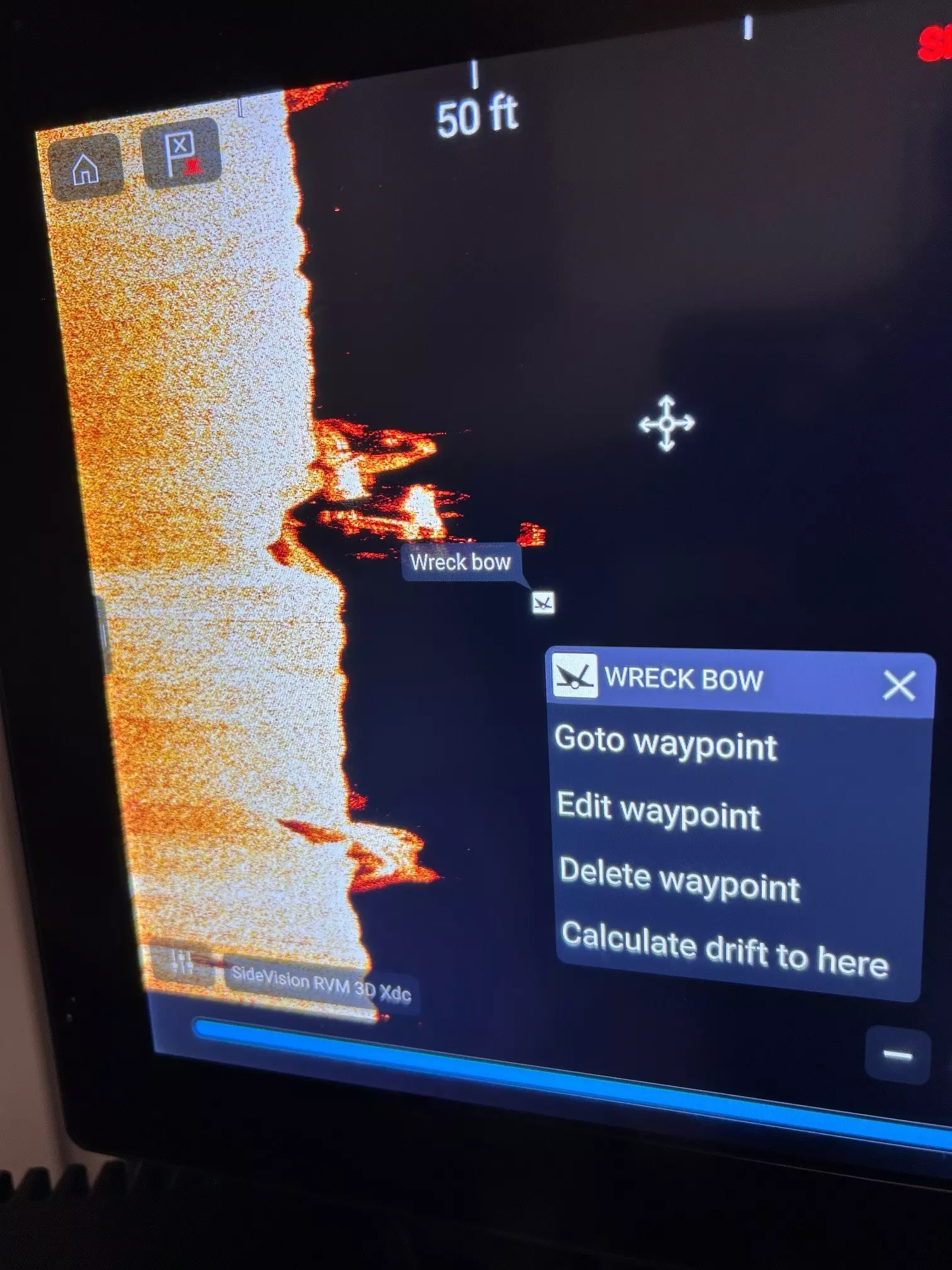
Capture d'écran du waypoint à l'aide de SideVision sur le traceur Raymarine Axiom.
Vous n’avez pas besoin de gérer la fréquence avec le sondeur SideVision sur Axiom car il exécute automatiquement une bande CHIRP haute définition (320-380 kHz). L’essentiel est d’ajuster les commandes qui influent sur la clarté et sur le contraste entre les ombres.
Augmentez jusqu’à ce que des taches faibles apparaissent, puis réduisez légèrement, en visant des bords nets et propres, sans bruit de fond excessif.
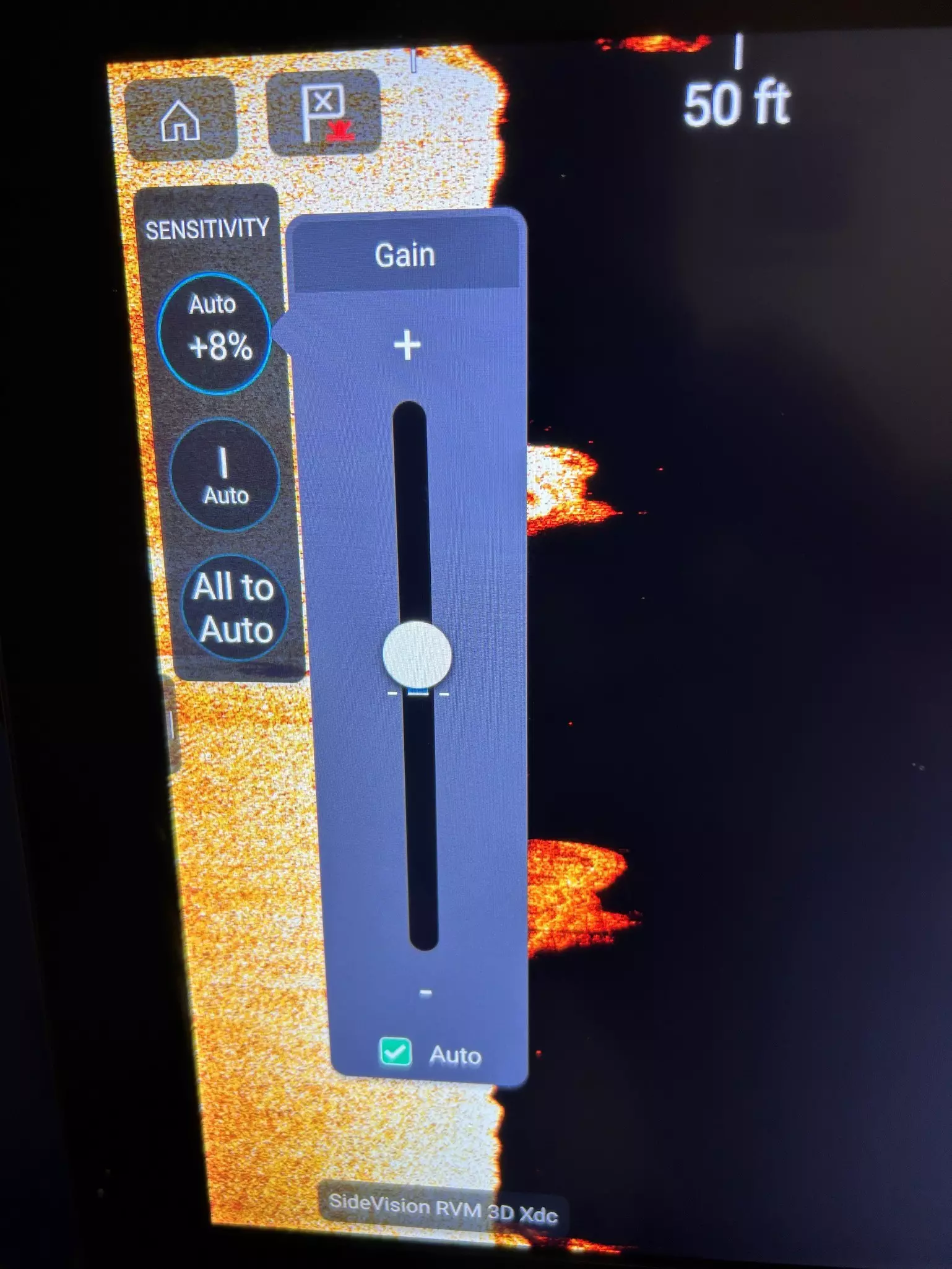
Capture d'écran des commandes de gain en utilisant SideVision sur le traceur Raymarine Axiom.
Ce paramètre contrôle l’échelle des palettes de couleurs, en particulier là où une colorisation blanche est appliquée pour des échos maximaux. Une légère augmentation permet d’affiner les bords durs et de conserver les ombres sombres et lisibles, mais si elle est trop élevée, elle fait disparaître l’image en supprimant des détails importants. L’objectif est d’équilibrer les retours durs et nets, les sédiments clairs et le fort contraste entre ombres, pour obtenir la vue la plus pertinente.
Le filtre de surface s'applique uniquement au canal DownVision et aide à réduire le bruit des bulles de sillage, des débris, du limon et d'autres particules près du sommet de la colonne d'eau. Le filtrage automatique fonctionne lorsque vous couvrez rapidement l’eau, mais la commande manuelle offre les détails les plus fiables dans ce type d’environnement accidenté.
La vitesse joue un rôle majeur pour conserver des images claires de SideVision et DownVision, et maintenir une vitesse constante de 2 à 4 nœuds préserve les contours nets et la géométrie d'ombre cohérente. Un déplacement trop lent étire et déforme les objets, tandis qu'un déplacement trop rapide réduit détails et clarté. Les changements brusques de vitesse déforment la forme des cibles, donc maintenir une vitesse constante donne les retours les plus précis et lisibles.
Si possible, croisez chaque élément important que vous voyez en partant d'au moins deux directions et déposez des points de repère sur les bords et sur les pointes d’ombres. Ce sont les points de repère les plus informatifs pour votre retour, car les poissons prédateurs ont tendance à utiliser ces zones comme zones d'embuscade lorsqu'ils se nourrissent de petits poissons-appâts.
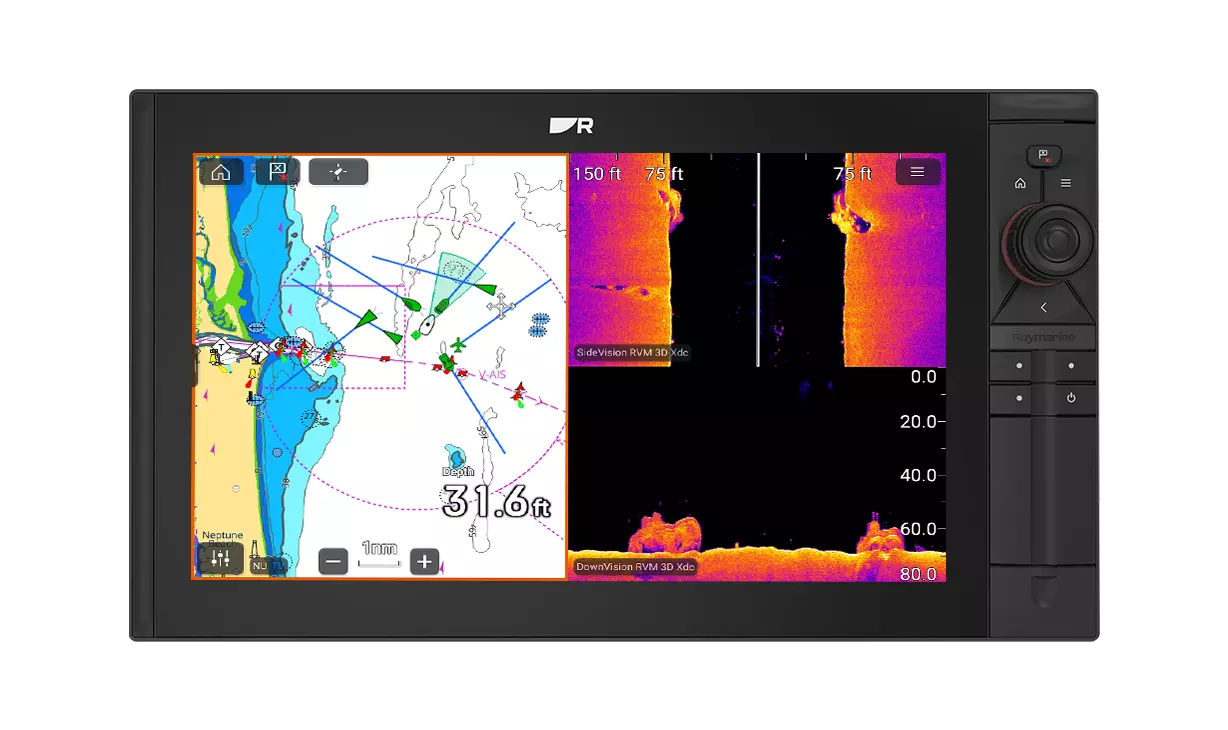
Le détecteur de poissons de votre Axiom devient encore plus puissant lorsque vous l'utilisez en tandem avec son traceur intégré. Non seulement vous pouvez voir où se trouve votre bateau par rapport au fond cartographié, mais vous pouvez également ajouter vos propres points de repère pour marquer les objets clés d'intérêt. Les points de passage que vous capturez sur vos écrans sondeur sont immédiatement visibles sur la cartographie ce qui vous permet de déterminer précisément comment les fonctionnalités que vous avez vues sur le sondeur correspondent aux sondages ponctuels et aux lignes de contour sur la cartographie.
Si vos cartes prennent en charge l'ombrage de profondeur, activez cette fonctionnalité pour mettre en évidence la bande de profondeur active du récif afin que l'« eau appropriée » se démarque clairement sur votre écran. Vous pouvez également créer une simple route qui touche chaque groupe de marques que vous avez identifié sur SideVision et la parcourir à la vitesse d'imagerie, normalement de 3 à 4 nœuds. Vous pouvez même utiliser votre pilote automatique ou votre moteur de dérive pour diriger la route pour vous.
Utilisez l'enregistreur de trace de votre traceur pour montrer quelles zones vous avez déjà parcourues, ce qui facilite la répétition des passages de produit. N’oubliez pas non plus de nommer et de coder par couleur les points de repère, afin que les motifs se démarquent, ce qui vous aidera à reprendre rapidement là où vous vous serez arrêté lors de votre prochain passage.
Que vous utilisiez poisson des récifs artificiels, des amarres, des bords de jetée ou des débris de pont, la méthode reste la même :
Balayagez large avec SideVision → resserrez la portée → effectuez une traversée à partir de plusieurs en-têtes → vérifiez avec DownVision → enregistrez les bords et les pointes d’ombre sous forme de points de passage.
Faites confiance à ce rythme et vous pourrez lire votre détecteur de poisson avec plus de confiance, identifier la structure plus rapidement et tirer plus de valeur de chaque passage.

Les traceurs de cartes Axiom+ RV combinent une navigation en toute confiance avec un sonar RealVision™ intégré pour une détection claire et fiable des poissons. Disponibles en 7, 9 ou 12 pouces avec GPS intégré.

Conçus pour les pêcheurs passionnés et la pêche au large, les traceurs de cartes Axiom 2 RVM combinent des performances rapides et réactives avec le sondeur RealVision™ MAX pour une détection précise du poisson et une navigation confiante. Disponibles avec des écrans lisibles en plein soleil de 9, 12 ou 16 pouces avec GPS intégré.

Module sondeur CHIRP 1 kW avec sondeur RealVision 3D, DownVision, SideVision et High CHIRP

Module sondeur CHIRP 1 kW avec sondeur RealVision MAX, DownVision, SideVision, 3D et CHIRP traditionnel 600 W












